State Observers: Design
Developing Models for Kalman Filters
Last time we discussed how to design observer equations, but since the whole concept was probably theoretical and unfamiliar, we need to do some good old fashioned number hacking to design a set of observer equations and give them a workout.
The observer equations
We will start from where we left off, with a
reasonable model that was clearly under-performing
because of noise. We developed some design equations, and
determined that we needed to select a matrix F
by some process to satisfy the following condition.
Basically, that just says that the magnitudes of all the matrix
eigenvalues are less than 1.0. The matrix (A - F C) then
becomes the state transition matrix E for the observer
equations:
where the values of state estimates z are
supposed to track the internal states of the system as well as possible.
Setting up
As noted last time, if the model is stable initially,
the observer equations can start with an observer gain F
of 0. But you can see that in this situation no output information
is used, and the state observer produces nothing useful. Here
is a state equation system that we have seen previously.
Amat = 0.98900 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.93000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.98960 -0.01477 0.00000 0.00000 0.00000 0.00000 0.01477 0.98960 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.92395 -0.29938 0.00000 0.00000 0.00000 0.00000 0.29541 0.92115 Bmat = 1 1 1 0 1 0 Cmat = 0.1232020 -0.1491940 0.0473420 0.0278580 -0.0145235 0.0036879
Initialize an empty observer system gain matrix.
Fmat = [ 0.00; 0.00; 0.00; 0.00; 0.00; 0.00 ];
Optional, calculate the stability boundary for plots. To be stable, the magnitudes of the eigenvalues of the observer equation matrix must all have magnitudes less than 1.0. I find it useful to compare their locations to this stability boundary.
% Calculate stability boundary points for plotting for iterm=1:61 sinval(iterm)=sin(pi*(iterm-31)/(3*60)); cosval(iterm)=cos(pi*(iterm-31)/(3*60)); end
The search for the gain matrix
Set up an Octave script that defines the following operations.
% Calculate proposed observation matrix Emat = Amat - Fmat * Cmat; % Calculate its eigenvalues evec = eig(Emat) % Display the eigenvalues and their magnitudes magnitudes = abs(evec)' evr = real(evec); evi = imag(evec); % Display the eigenvalues on a plot to evaluate stability plot(evr(1:6),evi(1:6),'k*', cosval,sinval,'r')
Now you can run this script each time you want to try a new proposed observation gain.
In this case, there is a single output value produced by the state equations with corresponding actual output values available in the input/output dataset. This makes things a little easier and a little harder. It is easier because the "gain matrix" becomes a "gain vector" and there are fewer terms to adjust. It is harder because a single output variable produces more constrained behaviors and there is not as much that you can control in your results.
Running the script without any Fmat adjustments, the
following shows the initial eigenvalue set.
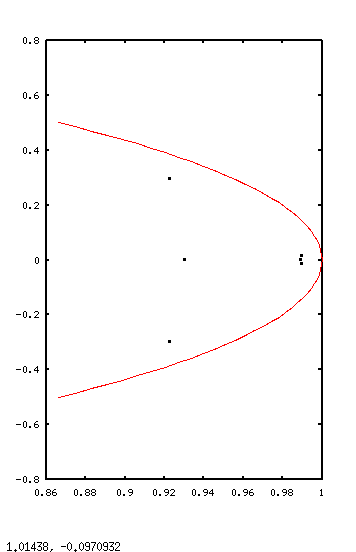
The biggest problem is the cluster of eigenvalues with magnitude about 0.99. That indicates very a very slow convergence rate for the state estimates. There is also one eigenvalue with magnitude about 0.92 which is maybe a shade too small, which could allow a little too much noise to disrupt the short-term convergence of the state estimates. If achievable, eigenvalues with magnitudes in the range 0.94 to 0.97 or so would be the most desirable compromise between speed of convergence and noise sensitivity.
The red curve is the stability limit for sampled systems. If any of the eigenvalues pass beyond this curve, errors will not settle and the state tracking errors will grow without bound.
I tried adjusting the terms of the Fmat
matrix one at a time, looking for a rough idea of the sign and a reasonable
magnitude for each term. Here are my notes from these experiments,
accumulated in the form of Octave comment lines.
%Fmat = [ 0.2; 0; 0; 0; 0; 0 ]; % Shifts middle eigenvalue pair %Fmat = [ 0; 0.2; 0; 0; 0; 0 ]; % Shifts lower real eigenvalue %Fmat = [ 0; 0; 1.3; 0; 0; 0 ]; % Spreads eigenvalue cluster %Fmat = [ 0; 0; 0; -.5; 0; 0 ]; % Shifts high eigenvalue pair %Fmat = [ 0; 0; 0; 0; -0.5; 0 ]; % Shifts low eigenvalue pair %Fmat = [ 0; 0; 0; 0; 0; -10 ]; % Shifts low eigenvalue pair
The indicated numbers seemed reasonable when applied
individually, but applying all at the same time is probably too much. So
I scaled the values all back by a factor of about 0.5, and then
combined the terms into a single Fmat matrix.
This showed a clear improvement.
From there, I continued adjusting terms of the Fmat
one or two at a time, and recalculated the observer matrix eigenvalues.
Here is the combination that I liked the best.
Fmat = [ 0.25; 0.1; 1.0; -0.9; -1.0; -4.0]; evec = 0.92763 + 0.26319i 0.92763 - 0.26319i 0.94819 + 0.03991i 0.94819 - 0.03991i 0.97687 + 0.00278i 0.97687 - 0.00278i ans = 0.96425 0.96425 0.94903 0.94903 0.97687 0.97687
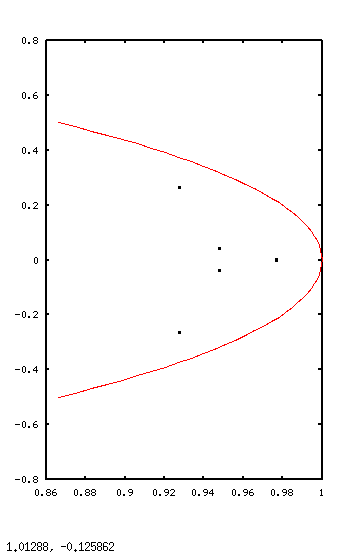
This was about as good as I could get it, and in a typically acceptable range. Let's try it.
Applying the state observer
Obtain a sequence of input and output data. For purposes of this test, the state transition equations are used to simulate the actual system by injecting some random noise into each of the state variables after each update.
% Noise affects actual system state and output realout = Cmat * Xnoisy; Xnoisy = Amat*Xnoisy + Bmat*indat(iterm) + noise(iterm);
Now apply the state equation model in the usual manner for a simulation. This calculation is given exactly the same input data, but not the hidden internal system noise.
% Simulate the normal application of the state transition model simout = Cmat * Xstate; Xstate = Amat*Xstate + Bmat*indat(iterm);
In parallel with the state transition equations, also update the state observer equations in an attempt to estimate the system's internal states from actual output values observed.
% Use input and output data to update observer equations Zstate = Emat*Zstate + Fmat*realout + Bmat*(indat(iterm));
Now we have a problem. We have two different estimated values for
what the next state will be. If we trust the original state transition
equations, the next state of the system is Xstate.
But if we trust the state observer equations, the state of the system
is Zstate. How can we resolve this inconsistency?
I have chosen to trust the observer estimate about twice as much as the state transition estimate. You can try adjusting this ratio as you wish.
Xstate = 0.35*Xstate + 0.65*stateZ ;
Now, instead of the original Xstate vector, I will
substitute this hybrid value that includes the corrections.
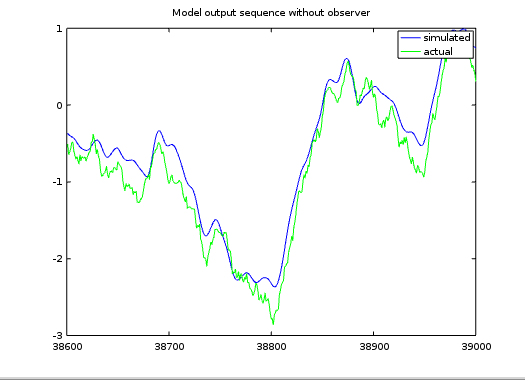
For comparison, here is the sequence of output values from the noise-disturbed system without any observer corrections applied.
Now, here is the modified result after introducing state corrections based on the state observer estimates.
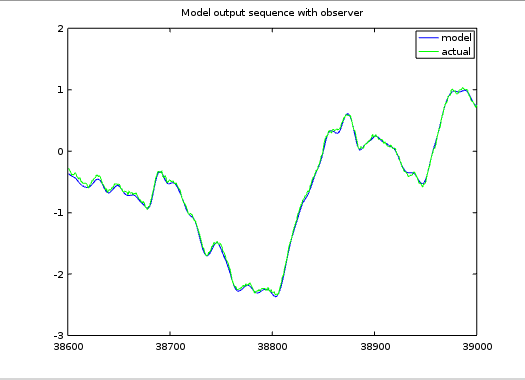
Is it starting to become apparent how the state observer can be beneficial?
Coming events
There is a very strong relationship between the observer equations and the state transition equations. That should be expected, since the state transition matrix contributes a significant part of the information that goes into the observer matrix design. Since linear effects are additive, perhaps we can reorganize the observer equations to distinguish the parts of its behavior that are the same as the state transition matrix, and the parts of its behavior that are different. Now you're starting to think like Kalman...
But before we go too far in that direction, there are other considerations we need to think about with regard to observers. We will pick that up next time.
Footnotes:
[1] For newcomers, or those who have not been following this series closely enough and have forgotten what a matrix eigenvalue is, there was a brief review of this side topic back in the article Restructuring State Models, part 3 in this series.