Abstract
This note describes a solution to the problem of evaluating "zoned circularity" from measurements of relative circumference displacements. The algorithm is shown to be equivalent to the primal-feasible simplex method for the classic Linear Programming Problem, hence it is guaranteed to locate the optimum in finite steps. In practice, a few extremal points tend to dominate the rest of the data set, and convergence is extremely fast, often reached with four or five pivot operations.
Zone Circularity Defined
International standards such as IEC 1101 describe tolerancing specifications for manufactured machined elements, without providing any particular help in how to obtain or analyze measurements for evaluating the criteria. One such tolerance specification is "zoned circularity." This specification bounds a circumference between a largest inscribed circle and a smallest circumscribed circle, where the two circles have a common center. This center point is not necessarily the point that was intended as an axis point in the original piece design, and it is not necessarily a point of best balance because it is concerned with extrema of the deviations rather than the overall mass. To evaluate zone circularity from measurements, it is necessary to determine four parameters: two parameters identifying the radii of the bounding circles and two parameters locating the center point for these circles. Once these parameters are identified, the circularity zone estimate is the difference between the two radii.
Other Algorithms
An algorithm that I will call "the Simple Algorithm" is described by P. B. Dhanish in [1]. I will leave the discussion of prior state of the art to the introduction of that paper.
There is nothing specifically wrong with the Simple Algorithm. It is quite straightforward to implement. The problem is that real world data sets are not always in the right form to apply it. If a part is measured along three orthogonal axes with a general purpose CMM (coordinate measuring machine), the data set is in the appropriate form. However, this is not the way that high precision measurements are usually obtained. Usually a cylindrical piece is fixtured carefully on a rotation table, and radial deviations along a circumference are observed by a high precision linear displacement sensor. It is much easier to maintain tight tolerances using a one axis mechanism and a sensor calibrated over a very short range — but difficult enough even so.
Considering Step 17 of the Simple Algorithm in [1]: "Calculate the distance from the center of the circle to the translated coordinates." This calculation cannot be done using the radial deviation dataset alone because the absolute radial distance information is missing. The best that can be done is to supply a good estimate for average radius and "cook" the data by this amount. The algorithm is not at all sensitive to this adjustment, but nevertheless, the adjustment will introduce some higher-order error. This must be considered in the context of the algorithm described here, which has its own higher-order errors.
The survey of prior art in reference [1] also mentions a simplex search algorithm by T. S. R. Murthy [2], stating that it had the problem of no guarantees of optimality. This note also employs a simplex search, but the problem is formulated in such a manner such that the classic proofs of convergence for the Primal- Feasible Simplex Algorithm for Linear Programming (the LP problem, e.g. [3]) will assure convergence to the optimal solution in finite steps. In actual practice, the optimum is often achieved after four or five pivot operations.
Unmeasured Fixturing Error
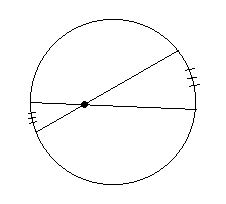
When measuring a cylindrical part with a rotation table, great effort is put into fixturing the piece so that its center axis aligns with the rotation axis of the table. However, this is not perfect, so there are displacement errors, of roughly the same order as the tolerances that are being tested. In this section, we briefly discuss the impacts of centering on the measurement data set and obtain from this a motivation for the bounding functions used by the algorithm.
If measuring a perfectly circular, perfectly manufactured, perfectly
centered part of radius R with perfect noise-free sensors, the
sensors would see no radial change whatsoever, hence the data sets would be a
"flat line." That is, displacement in radial direction is constant at every
rotation angle.
Now consider the impact of displacing the ideal object of radius
R by a very small vector displacement r. We are not
concerned about the direction of this displacement here, so for purposes of
discussion consider this displacement to be in the direction of the
x axis normal to the axis of rotation.
|
It is apparent in this illustration (with size of center shift exaggerated to magnify the effects) that angles of rotation with respect to the table — which is all we can really control — no longer correspond to equal angles with respect to the part itself.
|
|
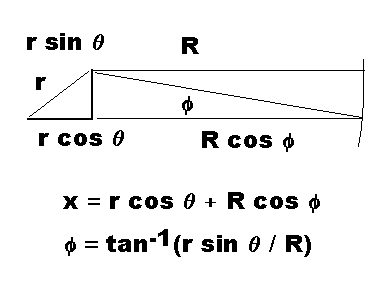
Analyzing the displacements with the assistance of the following vector diagram, we can observe that an expression for apparent radius, as measured at the circumference, is
R' = r cos θ +
R ( cos tan-1 ([ r sin θ]/R) )
|
|
where the terms are
R'- apparent radius of the measured piece with displacement
R- the actual radius of the measured piece
r- the small displacement of the piece's center
θ- the rotation angle of the precision table
When r is very much smaller than R, the
complicated multiplier on term R is not significantly
different from 1.0. In other words, a small fixturing displacement has
the apparent effect of introducing a sinusoidal displacement of
magnitude r through the data set. This wave will
influence each measurement when measuring a less-than-ideal piece in
less-than-perfect fixturing with real-world sensors.
With the displacements approximately sinusoidal, the apparent
radial displacements will range roughly from R-r to
R+r. It is possible to take the ratio of outside to
inside radius (R+r)/(R-r) into account by providing
reasonable prior estimates for R and r.
However, the ratio is so close to 1.0 in practice that the effect is
immaterial. Assume that the inner and outer bounding sinusoids have
the same magnitude, accepting that this leads to an insignificant
second order error in the bound estimates.
Formulation Of Problem
We know that the displacements introduced by any shift of the center, not just displacements due to fixturing errors, will have the same first-order effects discussed in the previous section. We know that the displacement effects upon measurement data are very nearly sinusoidal, hence they can be represented as a scaled sum of cosine and sine wave terms. We have assumed that the magnitude is the same for both boundary curves, so the model for these curves is:
U(θ) = ru + ds sin(θ) + dc cos(θ)
L(θ) = rl + ds sin(θ) + dc cos(θ)
where the terms in this expression are
U- values of the upper bounding curve
L- values of the upper bounding curve
ds, dc- parameters for magnitudes of sinusoidal displacements resulting from shifting the boundary curve center point
ru, rl- adjustable radius parameters for bounding curves
The problem is to select values of variables ru, rl,
ds and dc to minimize separation distance z
= ru−rl, subject to the bounding conditions on the
measured data set M
M(θ) ≤ U(θ) M(θ) ≥ L(θ)
Bounding curves are defined as feasible if the constraints are
satisfied, that is, if no data value is higher than the upper bounding
curve U and no data value is lower than the lower bounding
curve L. We can
define feasible bounding curves in terms of slack variables. Define two
non-negative slack variables for each measured term. Designate the slack
variables for the upper bounding curve as row vector Su, and
the slack variables for the lower bounding curve as row vector
Sl. For the upper bound curve, the curve term minus a slack
variable from Su yields the measured M value. For
the lower bound curve, the curve term plus a slack variable from
Sl yields the measured M value. If none of the
slack variables are negative, this indicates that the upper bound is truly
above all of the measurement terms and the lower bound is truly below.
While the sine and cosine curves are inherently nonlinear, these functions
never change and can be pre-evaluated term by term, to yield constant vectors
C and S respectively. Subsequently, the boundary
curves can be considered a linear form, with variable multipliers applied to
constant vectors. The combination of the linear constraints with the linear
objective criterion and sign constraints on slack variables yields a classical
linear programming problem.
To represent the problem in LP tableau form, let
Nbe the number of terms in the data set,I1be a constant vector of lengthNwith all 1 termsI0be a constant vector of lengthNwith all 0 termsR0be a constant row of lengthNwith all 0 termsIbe anNxNsquare unit matrix.
2N rows plus an additional cost
coefficient row.
rh rl ds dc Su Sl ======================================== I1 I0 S C -I 0 | M I0 I1 S C 0 I | M -------------------------------|-------- 1 -1 0 0 R0 R0 | -z
All we need to do at this point is apply a classic linear programming
solver with unconstrained sign on the first four variables and nonnegative
sign restrictions on the 2N slack variables.
A well known result from the theory of linear optimization (see [3] or [4] for example) is that if
an optimal solution exists (as it will for any adequate data set), a
basic optimal solution will exist. As the four critical variables
rh, rl, ds and dc will always be involved in
the basic solution, this means that there will be four slack variables
that are zero in the basic optimal solution. Hence, there will be four
and possibly a few more "points of contact" between the two bounding
curves and measured positions at the optimum.
Establishing An Initial Feasible Solution
While general simplex method solvers do not assume anything about
the structure of the constraints, this particular problem has an
extremely sparse special structure. The first N
constraints can be scaled by -1 "on both sides" by inverting all
signs in the first N rows. This results in the following
equivalent tableau.
rh rl ds dc Su Sl ======================================= -I1 I0 -S -C I 0 | -M I0 I1 S C 0 I | M ------------------------------|-------- 1 -1 0 0 R0 R0 | -z
By inspection, the slack variable columns form a trivial basis, but
not a feasible basis because positive slack variables cannot be equal
both to a non-trivial measurement vector and to its negative. However,
it is easy to construct an initial feasible basis by establishing flat-
line bounding curves that contain the entire data set. Find the index
kmax in the first N rows of the last column
such that -M is minimum at kmax (i.e.
M is maximum). Also find the index kmin in the
second N rows such that M is minimum at row
kmin.
For readers unfamiliar with conventional terminology of the LP
problem, we digress briefly and define a pivot operation as a
special set of row operations applied to a matrix. One nonzero term of
the matrix is designated as the pivot element. For every
matrix row k other than the row kp
containing the pivot element, compute the ratio of the two terms in
pivot column v: -v(k)/v(kp). Matrix row kp
is then multiplied times this ratio and added to matrix row
k. Finally, all of the terms in the pivot row are scaled
by 1/v(kp). The net effect of the pivot operation is to
zero all terms in pivot column v except for term
v(k), which gets a value 1.0. Various other terms
throughout the matrix are modified by the row operations in the
process. Notice that the pivot affects the last cost row as well as
the constraint rows, but there is no effect on identity matrix columns
for which the nonzero term does not lie in the pivot row. Hence, we
can omit these slack variable columns from the tableau, generating
them easily when needed later.
To start, the first pivot operation is performed in the
first column at location kmax, and in the second column
at location kmin. These two pivot operations will have
the effect of eliminating the nonzero cost coefficients from the last
row under columns 1 and 2, creating new
nonzero cost coefficients below columns 3,
4, 4+kmax and 4+N+kmin. One
nonzero term remains in column one and in column two after the two
pivot operation. The values in the last column in rows
kmin and kmax provide initial bounds on the
locations of the outer and inner bounding wave. The other terms of the
modified last column will show the values of slack variables, which at
this point are all positive. Columns 1, 2,
and the slack variable columns except 4+kmax and
4+N+kmin form a feasible basic solution, though probably
not optimal.
Introducing Sinusoids Into the Basis
We know that in the optimal solution we are seeking, there will
probably be some adjustment to the center location for the
bounding curves. The center point shift will result in a nonzero
sinusoidal component. In anticipation of this, introduce variable
ds and dc into the basis immediately.
The values of ds and dc are not sign
constrained, so we need to modify the usual minimum ratio rule of
linear programming for selecting a pivot element. Start with the third
column, the one for variable ds. To locate the pivot
element in this column, compute the following:
- Ignore any term that is in rows
kmin, that is in rowkmax, or that has a zero value. - Ignore any term that has the same sign as the cost term at the bottom of the pivot column.
- For the remaining rows, compute the ratio of the last column term to
the term in column
3.
kp of the
ratio value that is smallest in magnitude. The purpose of the testing
is to guarantee that the pivot operation will not result in making any
of the slack variables negative, which would result in invalid bounds.
Perform a pivot operation on column 3 with pivot element
kp.
Perform the same steps again, this time using column 4 as the
pivot column instead of column 3, and also excluding the previous
pivot row from the ratio test.
After completing these operations, there will be a single term with
value 1 in each of the first four columns, and all other terms in
these columns including the cost row will be 0. The pivot operations
will result in changes to the values in the last M
column, and will produce non-zero cost coefficient values at the
bottom of as many as four slack variable columns. From this point on,
the first four columns will remain in the basis and will not change;
they can be ignored, and their pivot rows are not involved in
subsequent ratio testing.
Improving the Basic Solution and Optimality
This section is just a brief review of the simplex solution method for the LP problem. Readers familiar with the algorithm can skip to the next section.
If all of the coefficients are zero or positive in the cost coefficient row, the current solution is optimal — any change to the basis must either make the optimality criterion worse or violate one of the sign constraints on a slack variable. Since the basis is full rank, the solution corresponding to that basis must be unique. Actually, it is rather common for a few extreme points to dominate the data set, hence it is not uncommon for the initial basis that includes the first four columns to be optimal.
At this point, if any of the four nonbasic slack variable columns has a negative cost coefficient, select that column as a new basis column. If there is more than one, the tie can be broken in any desired manner. This particular problem is not subject to the phenomenon of basis cycling so picking the column with the most negative cost coefficient is most likely to yield an optimal solution quickly.
For the elements in the selected pivot column, excluding the rows
corresponding to the four permanent basis variables, find the pivot
row kp such that in this row the term is positive, and
the ratio of the term in the M column divided by the term
in the pivot column is minimum. Pivot on the selected element.
Repeat all of the steps in this section until the condition for optimality is reached. For the same reason that it is not unusual to land upon an optimal solution immediately when first establishing the feasible basis, it is not unusual for a very small number of pivot operations to yield the optimum.
Once the optimum is reached, slack variables corresponding to
columns that are not in the basis set are assigned the value zero.
Nonzero slack corresponds to "points of
contact" between the bounding curves and the measurement set. The
terms of the last column in the rows having nonzero variables in
columns 1 through 4 yield the parameter
values for the bounding curves at the optimum. The estimate of the
zone circularity is then obtained from subtracting ru -
rl at the optimal solution.
Simplifying Computations
The 2N x
2N terms for the slack variables start as an identity matrix,
and most of these terms never change. The columns that are actually
needed can be generated on the fly. The following algorithm can be
compared to the previous description to verify that it performs all of
the same computations as the classical algorithm, yielding exactly the
same solution, but generating data only when needed.
Establishing Initial Feasible Solution
- Build a matrix with
2N+1rows and6columns, initially all zeros. - Place the terms
-MandMinto column1with cost term 0. - Generate in column
2a vector with all values 0 except for a term 1.0 in rowkmax. - Generate in column
3a vector with all values 0 except for a term 1.0 in rowkmin. - Fill column
4with one negative sine cycle, one ordinary sine cycle, and cost coefficient 0. - Fill column
5with one negative cosine cycle, one ordinary cosine cycle, and cost coefficient 0. - Generate in column
6a vector with all values -1 in the firstNterms and all values 0 in the secondNterms, plus one more cost term of 1. - Identify term
kmaxfrom column1. - Pivot on term
kmaxin column6. - Add
kmaxto the list of solution variable rows, associated with parameter variablerh. - Generate in column
6a vector with all values 1 in the secondNterms and all values 0 in the firstNterms, plus one more cost term of -1. - Identify term
kminfrom column1. - Pivot on term
kminin column6. - Add index
kminto the list of solution variable rows, associated with parameter variablerl.
Introducing Center Displacement Variables to Basis
- Copy column
4to column6. - Using column
6and column1, perform a test for pivot without sign restriction to find pivot rowkp. - Zero all terms of column
4except term in pivot row, which is set to 1.0. - Pivot in column
6at the selected pivot row. - Add the pivot row index to the list of solution variable rows,
associated with parameter variable
ds. - Copy column
5to column6. - Using column
6and column1, perform a test for pivot without sign restriction to find pivot rowkp. - Zero all terms of column
5except term in pivot row, which is set to 1.0. - Pivot in column
6at the selected pivot row. - Add the pivot row index to the list of solution variable rows,
associated with parameter variable
dc.
Locating the Optimum
Repeat all of the steps in this section until the initial test for optimality is satisfied.
- Check the cost coefficients in the last terms of vectors
2through5. If they are all non-negative, the solution is optimal. - Select one of the non-basic vectors having a negative cost coefficient, usually the most negative one.
- Copy the selected column to column
6. - Perform the ratio test to select a pivot element
kpunder sign restrictions, using column6and column1. - Clear all of the terms in the original selected column except for the pivot row, which has a value 1.0.
- Pivot in column
6at the selected pivot rowkp.
When optimality is reached, the index terms associated with
columns 2 and 3 locate the terms in the
first column where the values rh and rl can
be obtained. For purposes of a simple tolerance evaluation, report the
value rh-rl. The negative of this value will also appear
as the last element in the first column of the optimal solution. For
purposes of a more detailed presentation of the data, index terms
associated with columns 4 and 5 locate the
values of the ds and dc parameters in the
first column. For all other row indices that are not associated with
one of the solution variables, the first column provides the values of
the slack variables at the optimum fit.
A Final Observation
The method described here for zoned circularity can be modified to solve the related problems of finding the minimal circumscribing circle and maximal inscribed circle. Having only one bounding curve, one of the radius parameters is omitted, one set of slack variables is dropped, and one group of N bounding constraints is dropped. This reduces the problem from a 2N+5 x 2N+1 system to a N+4 x N+1 system. Only three operations are required to establish the initial feasible basic solution, and there will be three or more "points of contact" at the optimum. In other respects, the method of solution is similar.
Appendix 1 - Simplified Numerical Example
The following data set contains six points of radial displacement measurement, at equal rotation angles, covering one object rotation.
.0545; .0542; .0488; .0506; .0519; .0469;
After initial construction of the solution matrix first column, it is observed that the lowest number in the upper half of column 1 occurs in row 1, and the lowest number in the second half occurs in row 12. The basic slack variable columns with terms 1.0 in these two rows are constructed in columns 2 and 3. One negative cycle and one positive sine cycle appear in column 4. One negative and one positive cosine cycle appear in column 5. Column 6 is a working scratchpad column and is not shown.
-5.4500e-002 1.0000e+000 0 0 -1.0000e+000
-5.4200e-002 0 0 -8.6603e-001 -5.0000e-001
-4.8800e-002 0 0 -8.6603e-001 5.0000e-001
-5.0600e-002 0 0 0 1.0000e+000
-5.1900e-002 0 0 8.6603e-001 5.0000e-001
-4.6900e-002 0 0 8.6603e-001 -5.0000e-001
5.4500e-002 0 0 0 1.0000e+000
5.4200e-002 0 0 8.6603e-001 5.0000e-001
4.8800e-002 0 0 8.6603e-001 -5.0000e-001
5.0600e-002 0 0 0 -1.0000e+000
5.1900e-002 0 0 -8.6603e-001 -5.0000e-001
4.6900e-002 0 1.0000e+000 -8.6603e-001 5.0000e-001
0 0 0 0 0
After the first two pivoting operations, row 1 is associated with
the rh parameter, row 12 is associated with the
rl parameter, and the matrix consists of the following. The
parameter variables in rows 1 and 12 are not sign restricted, but happen
to be positive because the original data set was all positive. All other
column 1 values are positive, indicating that slack variables are
positive and a feasible solution is at hand.
5.4500e-002 -1.0000e+000 0 0 1.0000e+000 3.0000e-004 -1.0000e+000 0 -8.6603e-001 5.0000e-001 5.7000e-003 -1.0000e+000 0 -8.6603e-001 1.5000e+000 3.9000e-003 -1.0000e+000 0 0 2.0000e+000 2.6000e-003 -1.0000e+000 0 8.6603e-001 1.5000e+000 7.6000e-003 -1.0000e+000 0 8.6603e-001 5.0000e-001 7.6000e-003 0 -1.0000e+000 8.6603e-001 5.0000e-001 7.3000e-003 0 -1.0000e+000 1.7321e+000 0 1.9000e-003 0 -1.0000e+000 1.7321e+000 -1.0000e+000 3.7000e-003 0 -1.0000e+000 8.6603e-001 -1.5000e+000 5.0000e-003 0 -1.0000e+000 0 -1.0000e+000 4.6900e-002 0 1.0000e+000 -8.6603e-001 5.0000e-001 -7.6000e-003 1.0000e+000 1.0000e+000 -8.6603e-001 -5.0000e-001
When processing the nonbasic column 4, it has terms of sign opposite the cost coefficient (excluding rows 1 and 12) in six locations, with minimum ratio in row 9. After the column copy, and construction of nonbasic slack variable column with a 1.0 term in row 9, the pivoting operation yields the following.
5.4500e-002 -1.0000e+000 0 0 1.0000e+000 1.2500e-003 -1.0000e+000 -5.0000e-001 5.0000e-001 0 6.6500e-003 -1.0000e+000 -5.0000e-001 5.0000e-001 1.0000e+000 3.9000e-003 -1.0000e+000 0 0 2.0000e+000 1.6500e-003 -1.0000e+000 5.0000e-001 -5.0000e-001 2.0000e+000 6.6500e-003 -1.0000e+000 5.0000e-001 -5.0000e-001 1.0000e+000 6.6500e-003 0 -5.0000e-001 -5.0000e-001 1.0000e+000 5.4000e-003 0 0 -1.0000e+000 1.0000e+000 1.0970e-003 0 -5.7735e-001 5.7735e-001 -5.7735e-001 2.7500e-003 0 -5.0000e-001 -5.0000e-001 -1.0000e+000 5.0000e-003 0 -1.0000e+000 0 -1.0000e+000 4.7850e-002 0 5.0000e-001 5.0000e-001 0 -6.6500e-003 1.0000e+000 5.0000e-001 5.0000e-001 -1.0000e+000
When processing the nonbasic column 5, it has terms of sign
opposite the cost coefficient (excluding rows 1, 12 and 9) in six
locations, with minimum ratio in row 4. After the column copy,
and construction of nonbasic slack variable column with a 1.0
term in row 4, the pivoting operation yields the following. After
the last two pivot operations, the ds parameter is associated with
row 9 and the dc parameter is associated with row 4.
5.2550e-002 -5.0000e-001 0 0 -5.0000e-001 1.2500e-003 -1.0000e+000 -5.0000e-001 5.0000e-001 0 4.7000e-003 -5.0000e-001 -5.0000e-001 5.0000e-001 -5.0000e-001 1.9500e-003 -5.0000e-001 0 0 5.0000e-001 -2.2500e-003 0 5.0000e-001 -5.0000e-001 -1.0000e+000 4.7000e-003 -5.0000e-001 5.0000e-001 -5.0000e-001 -5.0000e-001 4.7000e-003 5.0000e-001 -5.0000e-001 -5.0000e-001 -5.0000e-001 3.4500e-003 5.0000e-001 0 -1.0000e+000 -5.0000e-001 2.2228e-003 -2.8868e-001 -5.7735e-001 5.7735e-001 2.8868e-001 4.7000e-003 -5.0000e-001 -5.0000e-001 -5.0000e-001 5.0000e-001 6.9500e-003 -5.0000e-001 -1.0000e+000 0 5.0000e-001 4.7850e-002 0 5.0000e-001 5.0000e-001 0 -4.7000e-003 5.0000e-001 5.0000e-001 5.0000e-001 5.0000e-001
Inspecting the cost coefficients in the last terms of the four
nonbasic columns 2 through 5, it is observed that all of these terms
are positive, hence any pivot operation that re-introduced these
slack variables into the basis would only serve to increase the
separation of the bounding curves, contrary to the goal of minimizing
the separation. Hence, an optimal solution is indicated. The optimal
values of the ds and dc are picked from rows 9 and 4 in column 1.
The radial separation between the two curves is picked from rows 1 and
12 of column 1. The difference is 4.700e-3, which is the width of
the circularity zone. Alternatively, it can be observed that the
negative of this result appears in the last term of column 1 and
can be read out directly.
Footnotes:
[1] A simple algorithm for evaluation of minimum zone circularity error from coordinate data, P. B. Dhanish, International Journal of Machine Tools & Manufacture 42 (2002) 1589-1594.
[2] A comparison of different algorithms for circularity evaluation, T. S. R. Murthy, Precision Engineering 8-1 (1986) 19-23.
[3] A classic reference, Linear Programming and Extensions, G. B. Dantzig, Princeton University Press, 1963.
[4] A more recent text, Linear Programs and Related Problems , E.D. Nering and A.W.Tucker, Academic Press, 1990.