LMS: Let the Model Self-Adjust
Developing Models for Kalman Filters
No, that is not really what LMS stands for. But why not?
Previous articles have discussed what a linear state model is, and how a dynamic state transition model can be constructed. Whatever method was used, when you go back to validate the model's results, you might find the result disappointing.
In situations like this, wouldn't it be nice to say:
"Here is the model. Here is the system input/output data. If the model doesn't match the actual data as closely as it should, let the errors indicate what adjustments the model needs to produce better results."
That is the topic for this installment.
Introducing LMS adaptive tuning
A method for doing this kind of parameter adjustment is
the LMS method.[1]
The ideas are quite easy to implement, and easy to understand too,
as long as you don't let notations for all of the "adjustable constants"
confuse you. However, in the interest of full disclosure:
the simplicity comes at the expense of speed. You will need
plenty of data and plenty of patience.
Start from the basic linear state model equations, as they exist after your initial attempts at model construction.
Collect data from actual system input/output measurements. This will be covered in more detail in a future installment. But for now, let us just presume that the data set has reasonable if somewhat noisy measurements of system input and output values over an extended interval of time.
Apply the input data to the mathematical model, term by term. This
allows the model to develop a sequence of estimated next-state vectors
x for each point, and from these, the predicted output
values y.
The predictions generated by the model can be compared term-by-term
with the output values the system actually produced. Identify
the model prediction errors as the differences between what
the model projects and what the actual system does:
Δ yi+1 = [projected y]i+1 -
[actual y]i+1.
The LMS strategy for adjusting the values of parameters (that are eligible for adjustment) can be summarized as follows:
For each point in the data set, adjust parameters in a direction that is an approximation to the local gradient, by a very small amount, in proportion to the output error at that point. Choose the sign of this adjustment so that the error is reduced.
Don't panic! This is much easier than it first sounds. It just means that you make a lot of very small pushes in the right general direction at every point, as you go. We will now examine details of how to do this for each part of the system model.
LMS Adjustments to Observation Matrix
Suppose there is low confidence in the values of the output observation matrix terms.
Consider the consequences of making an adjustment to the C
matrix terms according to the following formula, where the
update gain coefficient α is very small.
The x vector is the current estimated state vector. The
hat notation on the C matrix indicates the
original estimated values for these parameters.
After modifying the output observation matrix in this manner, the new output calculation will produce the original output value plus a small adjustment.
The xTx term is a
sum of squares and always positive. Thus, choosing the α gain
constant to have the negative of the sign of the model prediction
error will have the effect of reducing the prediction error at the
current point.
By including the current output prediction error in the updating formula
explicitly, it is possible to guarantee that the adjustment is proportional
the current output error but opposite in sign. Pick the
α constant to be small and positive, then
make each correction as follows.
For cases when C has multiple rows, just repeat
this for each of the rows of C, one at a time. The
adjustments for each of the output variables can use a different
value of the α gain constant. To make this somewhat
easier to manage, reorganize the various gain constants as a diagonal
matrix λ with terms somewhat larger or smaller
than 1.0 to control the relative learning rates on each individual
term, while scalar α provides an overall
rate adjustment for all output variables.
What happened to the fancy talk about "approximation to the
local gradient?" Well, we got that almost for free, because the value
of the state estimate x serves as this local gradient
estimate.
You might also wonder about the effects of noise. The model will of course generate results that are not subjected to the same noise disturbances that affect the real system. Since the "prediction errors" depend directly on the noisy outputs from the actual system, wouldn't using these noisy values cause the corrections to chatter upward and downward? Yes, and if the adjustments are too large, the process never gets anywhere. But make every adjustment very small — in fact, microscopic — and over an extreme large number of very small updates, truly random effects will balance out very close to zero, while non-random effects will nudge the model parameters consistently toward improved values.
You don't need to change all of the output parameter values
just because you could. Some adjustments would not be reasonable.
For example, sometimes you know that the model includes some states
that are not directly observable, and therefore have a zero parameter
term in the C matrix. The adjustments should not be
allowed to change the zero observation matrix term into something that
is non-zero.
LMS Adjustments to Input Coupling
Now let's consider adjustments for the parameters in
B, the input-coupling matrix, taking one input value and one output
value at a time. Using the lessons learned when examining
the C matrix adjustments, propose an adjustment to
the B matrix terms according to the following.
Substitute this adjusted value of the B matrix into the
state transition equations. We again see that the results consist
of the previous state projection, plus a very small correction.
Let's see what happens when this small adjustment affects the next state prediction and is observed with the C matrix.
Since the two squared terms always yield positive scalar values, we are guaranteed that the adjustment will reduce the model's output error at the current point.
As was the case for the C parameter updates, the
sign is critical to the algorithm. Each term of
the B matrix, even each individual update, could
use a different adjustment multiplier, as long as the result is
small and of the correct sign. We again let λ
multipliers represent the differences in scaling between different
B matrix terms, and leave an α
scalar controlling the overall update rate. This is the new
adjustment formula for updating the input coupling matrix terms.
Because of the CT
term in the updating formula, the most vigorous adjustments go toward
adjusting parameters associated with states that have the strongest
influence on the output variable. That could be a very good idea,
but maybe not in special cases where you are trying to adjust secondary
effects rather than the main ones. As said before, it is not the value
of the terms but the sign that is critical, so an alternative updating
formula that influences all terms more uniformly is
As in the case of the output matrix updates — don't use it if the changes the updating formula suggests are not appropriate for your model form.
LMS Adjustments to State Transition Matrix
Finally, let's consider adjustments for the state transition matrix
terms A, the heart of the model. This turns out to be very
similar to the other two cases.
If you don't have an initial model to get you into the right ballpark, clearly you would not have estimated state variables that were worth anything; and so you would not have any way to get the adjustments moving in the right general direction. Beware! Bad adjustments, too large or in the wrong direction, can produce unstable results. You will know it when you see it.
Propose an updating formula with the following form.
Substituting this adjustment into the model equations:
The effects on the observable outputs are then:
Once again, the squared terms produce non-negative scalar values, and we can be sure that the incremental adjustments to the state transition matrix are always in the direction of improvement.
Referring back to the discussion regarding updates to the input
coupling matrix B, an alternative updating scheme that
does not favor the state equations contributing the most directly to
output observations is the following.
As in the case of the other model terms, there are options to control
the relative adjustments applied to each state variable. Let P
represent any positive definite matrix. To avoid confusion with the
rate adjustment factors, select the P matrix so that the
norms of row and column vectors are not too far away from 1.0. This
matrix will have the property that for any vector v:
Modify the update expression to include an additional P
matrix as a "mixing" term, and then take a look at changes in the
observable outputs.
Thanks to the properties of positive definite matrices, the sign on
the incremental change remains correct, so the adjustment is guaranteed
to produce gradual improvement in the output prediction error. This
tells us that there are many ways of adjusting the transition
matrix terms successfully. The advantage of the P
transformation is that it allows adjustments to be "spread around"
to parameters having no direct and immediate influence on output terms.
Some common strategies for selecting a P matrix:
Let the
Pmatrix to be an identity matrix. This reduces to the original case without the "mixing" terms.Choose the
Pmatrix to be a diagonal "scaling" matrix with all positive terms. This could help to keep adjustments consistent with sizes of expected state variable variations.Choose the
Pmatrix so that it has approximately 1.0 terms on the main diagonal, and small, unbiased random terms off diagonal. This kind of "annealing" might help to break up artificial patterns in the update sequence and produce improvements that might otherwise be difficult to discover.Choose the
Pmatrix to be the inverse of the state covariance matrix. An estimated covariance matrix can be obtained from thexstate sequence calculated by the model; then invert this matrix. When certain state variables are relatively noisy and others are relatively quiet, this "levels the playing field" so that corrections are applied roughly in proportion to how trustworthy the current state estimates are.
Clearly, different values of P will send the adjustments along different trajectories. Since the state space representation is not unique, you can never be sure of exactly how your model might change — but you can expect improvement.
As with cases before, do not apply changes to terms that are not supposed to change. For example, if your state transition matrix is supposed to have a diagonal structure, do not change off-diagonal terms.
Adjust everything all at once?
There is nothing that says you can't try it. But keep in mind that the linear models are not unique, and things could rattle around for a very long time, producing relatively large adjustments to the model but no improvements of any significance in results.
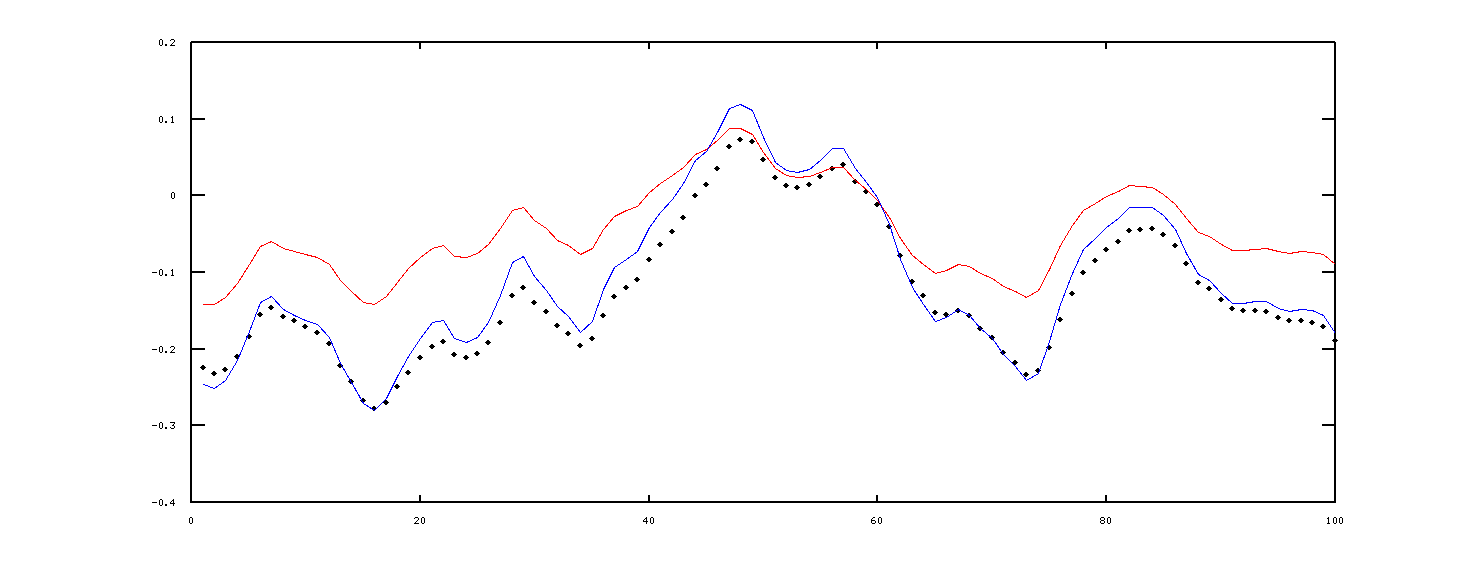
An illustration
As a credibility test, the LMS method was applied to a linear system with a randomized single input and a single output. In theory, it should be possible to match this closely, except for the hidden random errors within the real system state variables. The black dots in this plot show the output values observed from the system. The red curve shows the output trajectory predicted by the initial model... not so good. The blue curve shows the response after the LMS algorithm has performed 100000 updates. Not perfect, but much better.
We will revisit this topic later in the series, but there are a few more things we need to know about first.
Footnotes:
[1] The definitive source for information about the LMS method is Adaptive Inverse Control by Bernard Widrow and Eugene Wallach, Prentice Hall Information and System Sciences series, ISBN 0-313-005968-4, 1996. Ironically, using the LMS method for tuning state transition models was not one of the applications discussed in the book. In fact, I have never seen this discussed anywhere, have you? Maybe too obvious.